Multi-Body Dynamics (MBD) 多体动力学,是用于研究受到外力和运动所引起的机械系统运动的学科。机械系统中主要由组成机构部件的体Body、约束Joint、力Force、接触Contact等元素构成。
简单来说,多体动力学是对相互作用的物体的运动预测。多体动力学模拟的结果是物体的运动和作用于各个物体之间的各种相互作用力。多体动力学与多柔性体动力学(MFBD, Multi-Flexible-Body)相反,是对被一群理想化的完全刚性物体间的模拟;详情可查阅 “MFBD柔性体技术” 页面。多体动力学仿真软件通过自动形成微分方程来描述一运动机构系统。然后用数值方法求出物体间的运动和相互作用力。
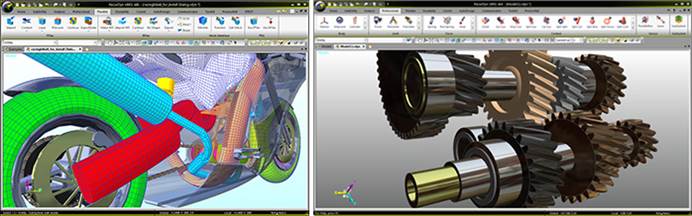
RecurDyn是世界领先的多体动力学仿真软件。它提供了稳健、易用和完善的多体动力学仿真解决方案。它提供了快的解算器和所有多体动力学软件的广泛的特性集。RecurDyn包含了多体动力学仿真分析中可用于商业应用的先进技术解决方案。
微分方程求解器Differential equation solvers
- RecurDyn包含了许多微分方程求解器,即所谓的“积分器”,用来解描述多体系统运动的方程组。
- 采用相对坐标以及递归算法,这种先进的数值计算的方法可以大大减少计算所产生的方程数量,在保证计算精度的同时极大的缩小仿真时间,提高计算效率。
- 采用Implicit Integrator(隐式积分器)很大限度的发挥递归算法的优势。
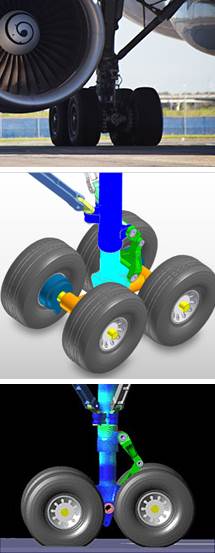
- RecurDyn的主要多体动力学积分器是Generalized-Alpha方法;它还包含其他专门的解决方案,用于各种各样的问题类型,例如对履带式车辆的建模,如挖掘机和军用战斗坦克。
快速线性求解器Fastest Linear Solver
RecurDyn所使用的是高性能的Multi-Frontal Linear Solver。使用该求解器在求解刚柔(MFBD)模型时能大量的缩短仿真时间。
世界领先的接触算法World-leading contact formulation
接触对于多体动力学仿真分析是极其重要的。在许多机械系统中,机构部件通过与其他部件的接触相互作用。此外在数学上,接触也是非常复杂的数值分析方法,对于大多数软件来说都很难建模。然而,RecurDyn了高度先进、稳健且易于使用的接触算法建模,能能够高效的提供准确的计算结果。
先进、集成、直观的用户界面 Advanced, Integrated, Intuitive GUI
RecurDyn基于Windows环境下进行开发,用户可以方便的在RecurDyn的操作界面中进行几何建模、约束定义和接触施加等操作。