2026年7月2日晚八点
邀您到仿真秀看《RecurDyn机器人动力学仿真案例赏析》

随着近几年AI技术的爆发式增长,通过训练机器人可获得一个能感知、理解、决策并行动的“AI大脑”,基于海量的数据、强大的算法和高效的算力,以训练出的基础模型为本,机器人能适应多种环境和任务,不得不感叹机器人在领悟方面变得越来越厉害了。
AI是机器人的“灵魂”,机器人本体则是承载灵魂的“躯体”。 AI的下限决定了机器人能做什么,而本体的上限则决定了机器人能否做到。正所谓没有强大的本体支撑,再聪明的“灵魂”也无法施展。AI赋予机器人理解复杂环境、执行精细任务的能力,与此同时也对机器人本体的机动性、稳定性提出了前所未有的挑战, 在AI算法突破所带来的机器人“大脑”能力突飞猛进的同时,确保机器人本体的精度和灵活性变得越发重要了。
RecurDyn作为一款专业的机械系统动力学仿真软件,长期以来在评价机械产品动力学性能方面一直发挥着重要的作用,近年来更是在机器人性能仿真验证方面获得了广泛的应用。
机器人工作过程不单单是动起来,安全、精准达成目标是机器人的核心使命。动力学仿真模型的颗粒度决定了动力学仿真能够得到怎样层级的结果。机器人工作过程所展现出的性能一方面由机器人与其环境因素(比如控制系统、作业对象等)的相互作用决定,另一方面由机器人本身的结构决定,在建立机器人动力学仿真模型时,涵盖的模型细节越多,仿真模型与真实的机器人工作过程越接近。
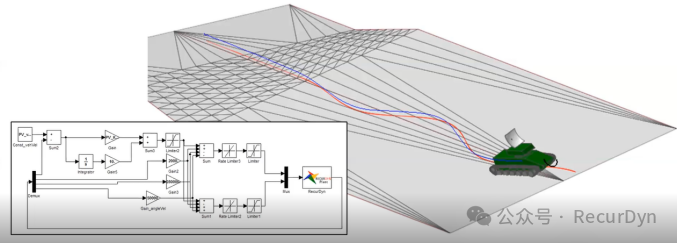
RecurDyn的Co-Simulation仿真通过GPIN/GPOUT将机器人本体与控制系统的数据双向耦合,分析机器人运动及动力传递性能的同时,也验证控制策略的有效性。
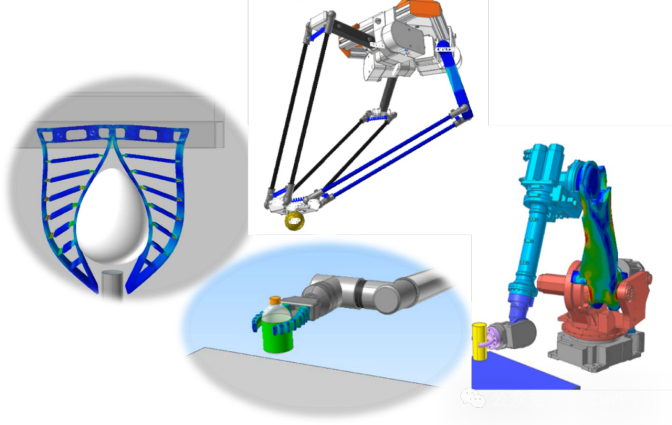
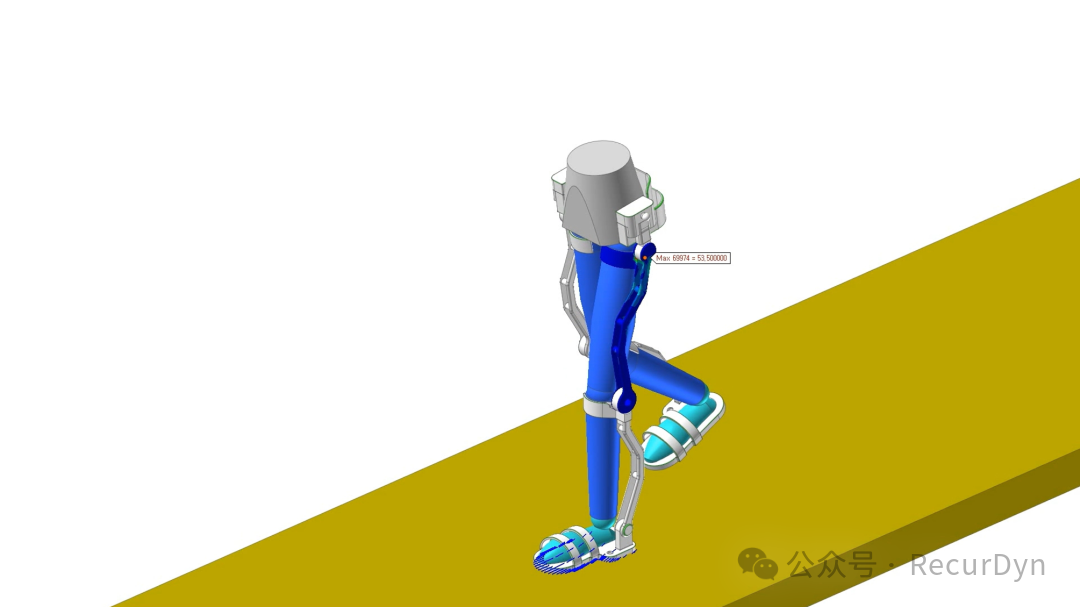
机器人在工作过程中,本体机构运动的同时材料也在发生变形,某些情况下,机构运动过程的材料变形会影响到机器人的精度;而某些情况下,机器人则需要利用材料变形才能完成其既定任务。RecurDyn刚柔耦合分析能够直观、确定地验证材料变形对于机器人工作的影响或效果。
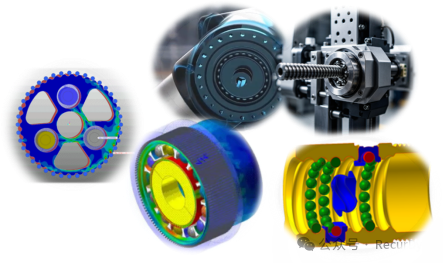
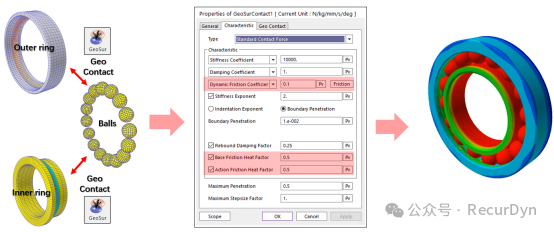
滚珠丝杆作为机器人关节模组中将旋转运动转化为直线运动的核心传动元件,谐波减速器与RV减速器是机器人关节模组中核心的传动部件,这些核心部件的性能直接决定了机器人的整体表现。在RecurDyn中可以建立详细的动力学模型,分析核心部件的动态性能。
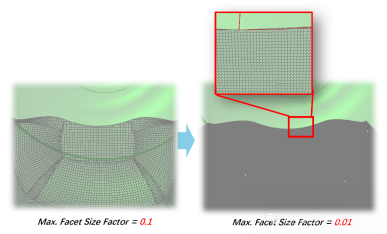
接触是动力学仿真的关键模型元素,RecurDyn2026新版本,支持更加精细化的接触面几何,从而在仿真时能够捕捉到机器人更加细化的模型细节。
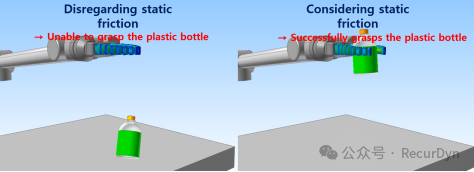
在机器人工程过程中,摩擦既可能是能耗的来源(比如关节减速器内部的齿轮啮合面,轴承滚动体与滚道之间,直线导轨的滑块与导轨之间等),又可能是实现抓取、传动、制动和精密定位不可或缺的物理条件,在RecurDyn模型中通过调整摩擦参数可以验证摩擦对于机器人性能的影响。
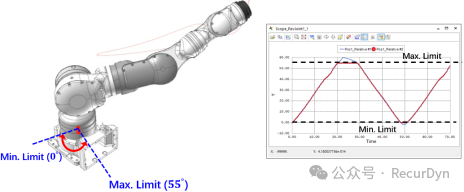
机器人限位既是硬件层面的安全保障,也是软件控制的必要组成部分,通过限位可限制关节的运动范围,防止超出机械或安全边界。在RecurDyn模型中,可直接设置运动副的运动范围,更加方便建立仿真机器人仿真模型。
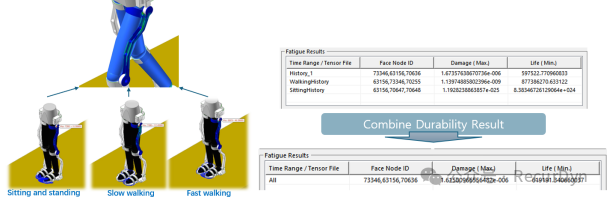
随着机器人能力越来越强,其应用场景得到拓展,不少机器人需要长时间连续工作,这不仅考验机器人的力量,而且还考验机器人的耐久可靠性,RecurDyn疲劳耐久分析能够将多个工况的动力学分析结果综合起来考虑其疲劳损伤累积结果。
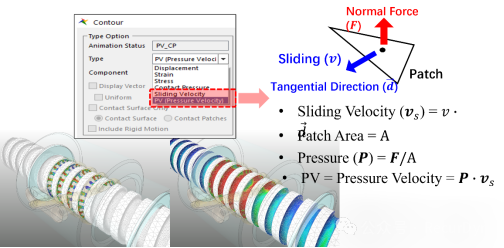
发热是机器人性能、寿命和安全的隐形杀手,发热可能不会立刻让机器人停止工作,但是过度的发热逐步侵蚀机器人的精度、可靠性和安全性,最终以突发故障或批量废品的形式爆发出来。有效的热管理,是保障机器人长期稳定运行的生命线。在RecurDyn中,提供热分析功能,不仅支持摩擦生热分析,同时也支持热传递分析。
只要有相对运动、有接触、有负载,磨损就必然发生,磨损是机器人“生命”的自然过程,磨损计算在机器人领域具有非常重要的工程和经济意义,通过RecurDyn仿真计算得到的磨损量,可为进一步的优化维护、控制质量提供依据。
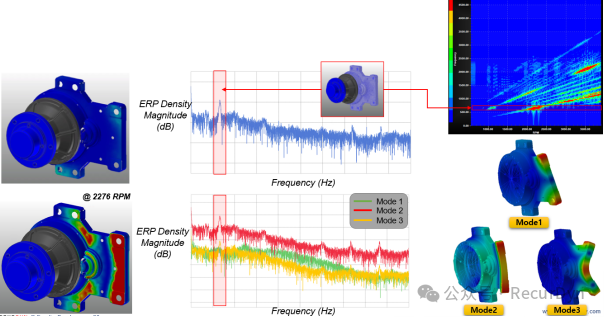
NVH性能决定着机器人的品质,随着机器人向高性能、高精度、高舒适度方向发展,对机器人的NVH性能提出了更高的要求,基于RecurDyn动力学分析结果,可进一步进行NVH性能评价,有助于指导机器人的正向设计与优化。
过去一个月,「2026机器人仿真技术交流月」一路走来:我们围绕仿真痛点层层递进:第一期聚焦人形机器人热仿真,从热源测绘到温度链设计,给出整套散热架构方法论;第二期深入热-固、流-固等多物理场耦合,拆解性能提升的关键CAE实战;第三期则把目光投向本体刚柔耦合,李老师详解工业机器人柔性体建模、联合仿真与控制柜散热等实操流程。读者朋友可以在仿真秀官网和APP回放。
三期下来,一条主线愈发清晰——AI赋予机器人越来越聪明的"灵魂",而承载灵魂的"躯体"正成为决定产品上限的关键变量。本体的精度、稳定性与耐久可靠性,靠什么验证?答案指向一个更深层的命题:动力学仿真。
7月2日晚20:00,2026机器人仿真技术交流月第四期如约而至。本期我们聚焦RecurDyn机器人动力学仿真案例赏析,从动力学仿真模型颗粒度出发,逐一拆解机械-控制一体化Co-Simulation、刚柔耦合分析、关节模组精细化建模(滚珠丝杆、谐波减速器、RV减速器)、精细接触与摩擦定义、关节限位设置、多工况疲劳耐久评估、摩擦生热与热传递分析、磨损计算、NVH性能评价等十大工程议题。请识别下方二维码参加直播和观看回放
