双履带城市侦察机器人性能的虚拟验证
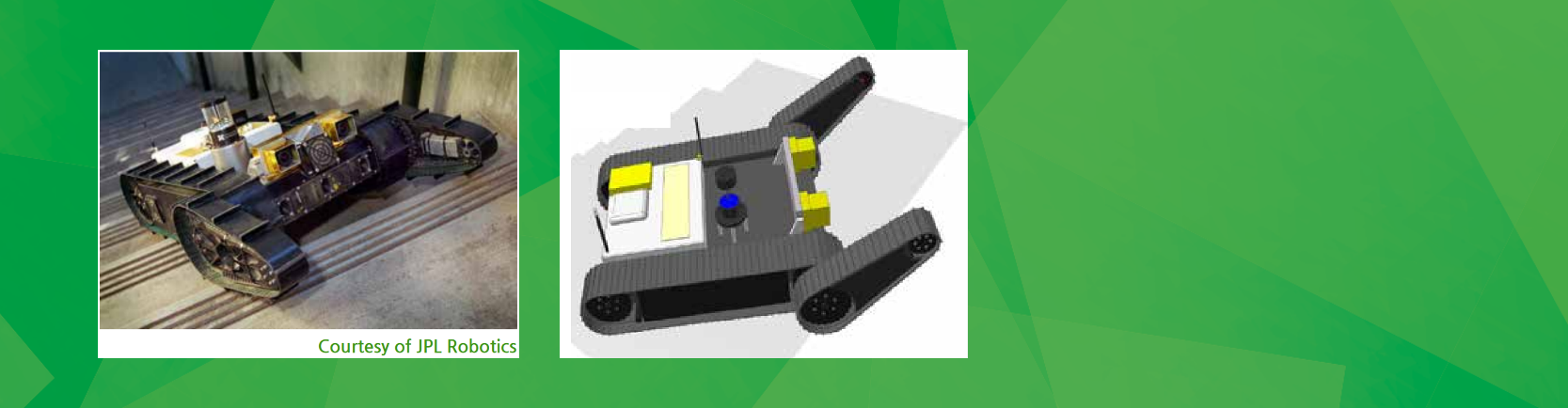
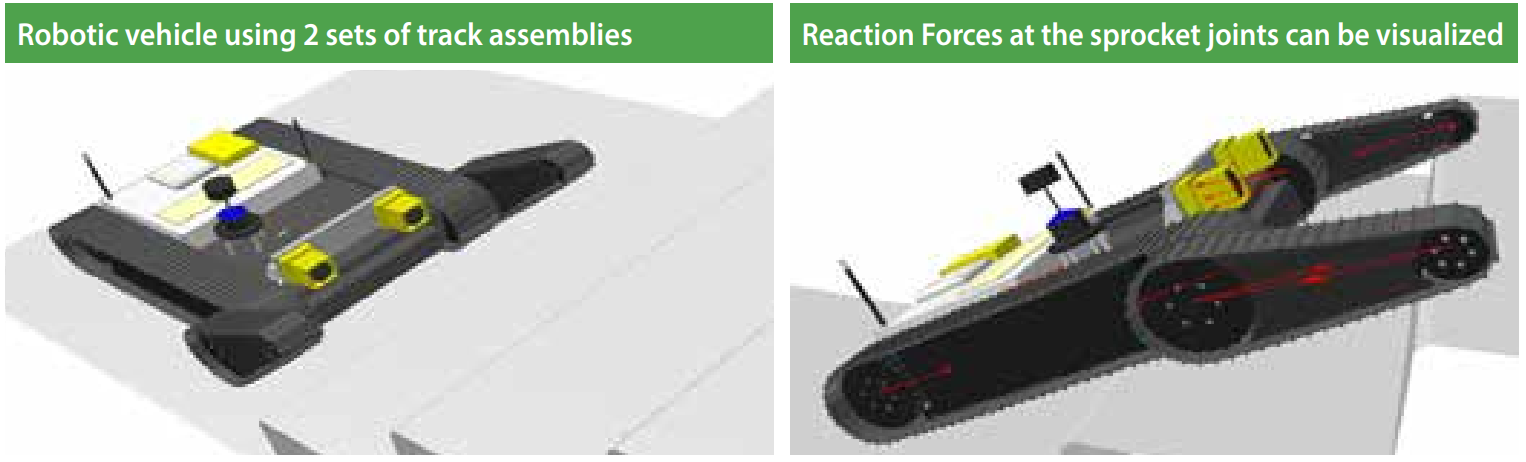
侦察机器人必须能够在各种驾驶条件下执行任务,在城市环境执行任务时可能会遇到机动性的极端挑战,比如攀爬楼梯。由主履带与子履带共同构成的双履带机器人,在上楼梯时子履带系统平放,能提供更长的接触长度,着陆平地后子履带系统向上旋转,可缩短机器人所需的间距,且便于机器人整体旋转。一个评估各类机器人车辆对城市任务适用性的军事研究小组,在概念阶段通过仿真手段来预测机器人车辆的可能行为,然而建立复杂的履带多体模型并运行仿真并非易事,RecurDyn独特的履带工具包所提供的履带组件库和组装过程自动化,为双履带城市侦察机器人爬楼梯性能的有效验证带来了极大的便利。
Customer Challenges 面临的挑战
- 在早期阶段快速验证机器人的新概念,以确定是否可完成预期任务
- 大量的履带链节加大了履带仿真建模过程的装配难度
- 梯级与履带链节之间存在复杂的接触关系
- 需仿真原地转弯和攀爬等复杂运动工况
- 需解决机器人驱动电机的选型困难
Solutions 解决方案
- 建立准确的履带系统虚拟模型进行不同驾驶场景仿真
- 采用履带系统专用的快速自动接触检测算法
- 定量评估机器人的驱动扭矩

Process 流程
- 快速建立复杂履带系统的精确模型
- 设定履带链节与楼梯之间的接触参数
- 简单直观地定义控制零件的运动
- 计算驱动和爬楼梯所需的扭矩,以确定适当的电机型号
Key Technologies for Analysis 关键技术
- 采用履带建模专用界面,便于快速建立多个履带链节组成的履带系统模型
- 采用自动检测履带和楼梯接触的快速接触算法
- 借助易用的函数表达式对复杂运动进行数学建模
Outcomes 效果
- 在设计早期通过虚拟仿真对新设计进行了验证
- 确定驱动和爬楼梯任务所需的电机功率及能耗
- 定义了机器人的操作极限
- 仿真结果为潜在的设计改进提供了指导